Happy Birthday OPS-SAT!
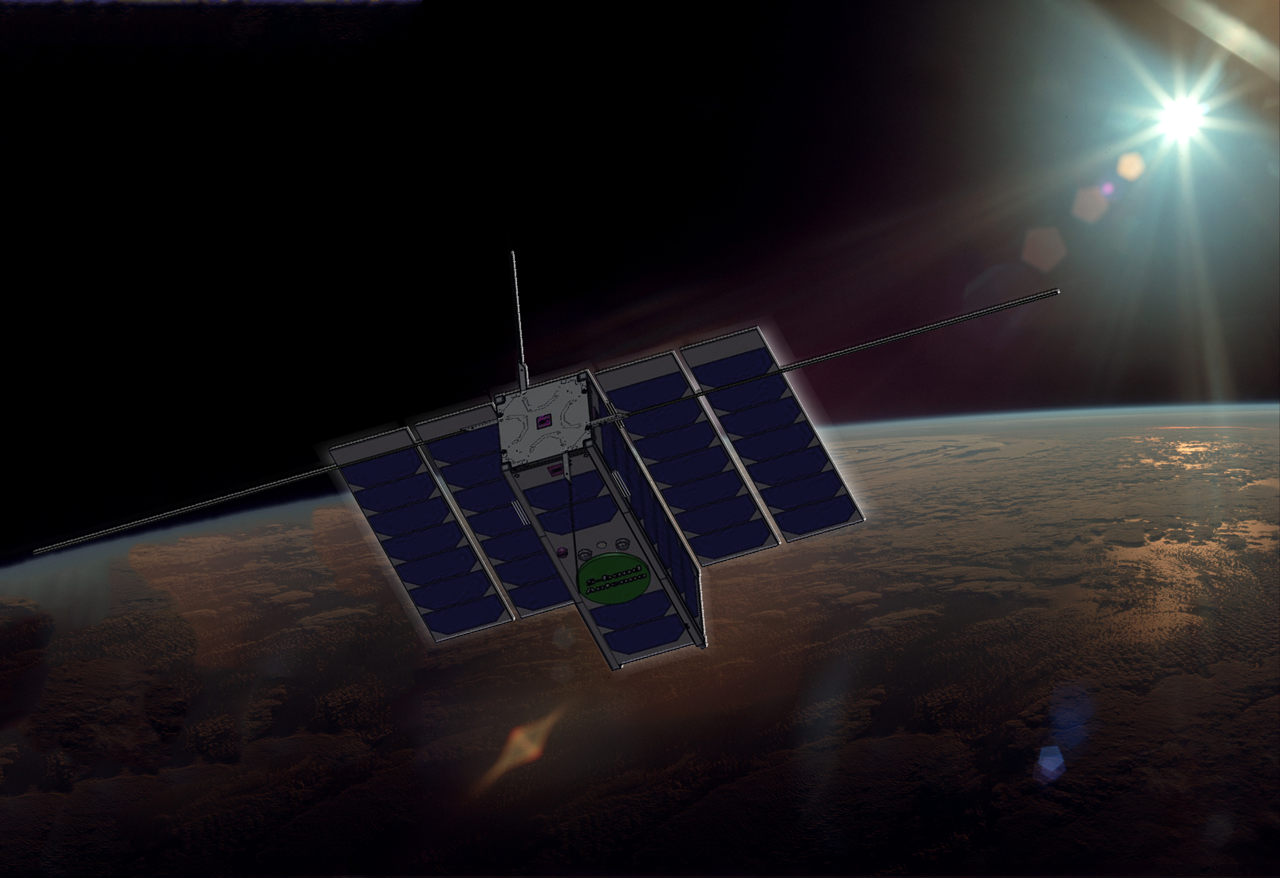

The CubeSat OPS-SAT was launched into space on 18 December 2019 from the Kourou Cosmodrome in French Guiana aboard a Soyuz VS23 launch vehicle. OPS-SAT is the only flying laboratory in the world.
OPS-SAT, developed by the Graz University of Technology, is the only space vehicle in the world available for public use. It shows us what satellites are capable of when equipped with state-of-the-art technology, visualising continuous improvements in mission control and demonstrating what space technology can do.
The orbiting laboratory provides a range of resources, including processors, field-programmable gate arrays (FPGAs), cameras and an attitude determination and control system that experimenters can use to demonstrate new mission and operational concepts.
The OPS-SAT architecture consists of two main parts. The first is the OPS-SAT "bus", which provides the necessary infrastructure for the operation of the second part, the payload. In this case, however, once the payload is up and running, it can take control of the entire satellite while the bus monitors it and is ready to take control again at any time.
Otto Koudelka erklärt OPS-Sat
The video is provided via Youtube , a connection to the servers of Youtube is established (see privacy policy).
The payload of OPS-SAT
Processing Platform
At the heart of the OPS-SAT satellite payload is the processing platform, which is responsible for providing a reconfigurable environment to achieve the objectives of each experiment. The processing platform runs Linux as the operating system consists of a flexible and reconfigurable framework that provides advanced processing capabilities, interfaces, memory integrity and reconfigurable logic.
The platform consists of an 'Altera Cyclone V SoC' with an ARM dual-core Cortex-A9 MPCore and a Cyclone V FPGA. The OPS-SAT experimenters will provide bootable images for this processing platform. These images will undergo certain pre-tests before being loaded onto the spacecraft. The power consumption and temperature of the processor core will also be monitored by the on-board computer to provide additional safety mechanisms.
Fine attitude control system (ADCS)
An integrated fine ADCS will provide experimenters with access to sensors and actuators as well as an integrated attitude control function. It consists of gyroscopes, accelerometers, magnetometers, reaction wheels, three magnetorquers and a star tracker.
GPS receiver (Global Positioning System)
A GPS module is provided so that experimenters have access to position data and time information.
S-band transponder
A CCSDS-compatible S-band communications link is provided for high data rate communications, serving as the main link for data communications and TM/TC with ESA ground stations. It will provide uplink speeds of up to 256 kbit/s and downlink speeds of up to 1 Mbit/s. The S-band link will be used to upload the experimenters' software and download the results of on-board experiments.
X-band transmitter
An X-band transmitter with a high data transmission rate of up to 50 Mbit/s.
Camera
A high-resolution camera capable of providing ground resolution of up to 80m x 80m per pixel.
Optical uplink
An optical receiver is provided that can receive commands from a laser ranging station on the ground. An uplink rate of 2 kbps is expected.
Software-defined radio
A software-defined radio front-end will be provided, connected to one of the two diploes in the UHF antenna. The results of this experiment will be made available on the processing core for further processing by the experimenters, e.g. for an on-the-fly spectrum analyser.
Interfaces
Experimenters will be able to communicate with their flying experiments in a variety of ways, from offline file transfer only to receiving and sending space packets in real time using a brand new CCSDS protocol (MO services) over the Internet.
Source: ESA